5 platform specifications, Rotation and payload inertia - range, Rotation and payload inertia - performance – Adept s650H Quattro User Manual
Page 92
Chapter 7 - Technical Specifications
92
Adept Quattro s650 Robot User’s Guide, Rev B
7.5
Platform Specifications
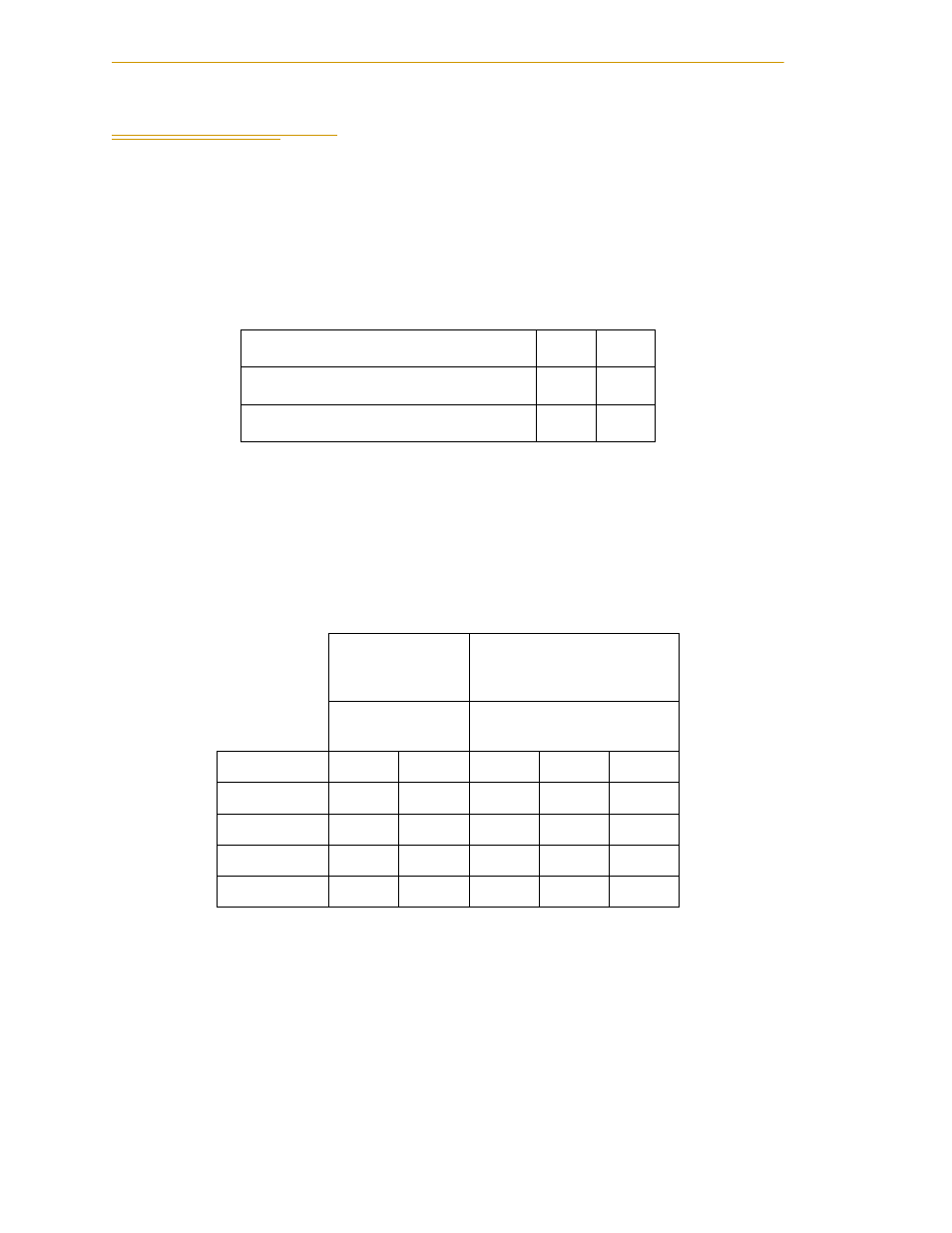
Rotation and Payload Inertia - Range
With a practical platform limit of 8 Nm, the gearing of the rotation affects the limits of the
tool rotational forces.
The platform is physically limited to just over ± 50°. The 4:1 platform is limited, in
software, to ± 45°, yielding tool rotation of ±180°.
There is an inherent trade-off between range of motion and payload inertia. Increased
inertial loads are acceptable, but rotational accelerations must be limited not to excite
vibrations in the outer arms and ball joints.
Rotation and Payload Inertia - Performance
The 8 Nm platform limit can be equated into a tool inertia for a given Accel.
Platform Gear Ratio
1:1
4:1
Allowable Tool Rotational Force (Nm)
8
2
Allowable Tool Rotation (Degrees)
±50
±180
Allowable Tool
Inertia
(Kg-cm
2
)
Time for Complete
Rotation (ms)
Platform Gear
Ratio
Degrees of Rotation
Accel Value
1:1
4:1
90
180
360
100
672
42
316
>447
>632
250
269
17
200
283
>400
500
134
8
141
200
283
750
90
6
115
163
231