Analog, Pulse train reference – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 157
6 Adjustments
6.1.3 Monitoring Operation during Adjustment
6-6
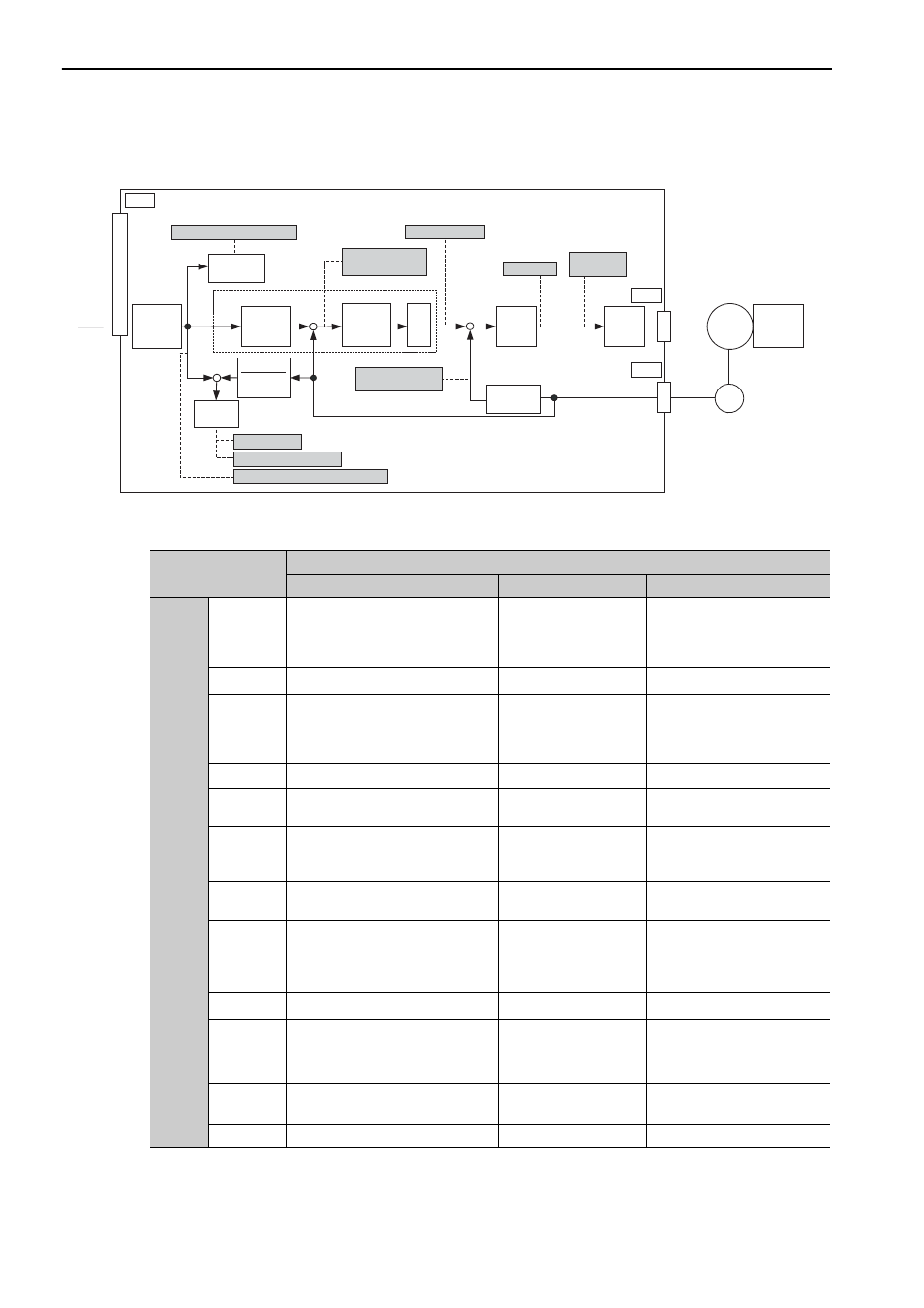
Pulse Train Reference
The following signals can be monitored by selecting functions with parameters Pn006 and Pn007.
Pn006 is used for analog monitor 1 and Pn007 is used for analog monitor 2.
∗
Refer to
6.8.1 Switching Gain Settings
for details.
Kp
(U/V/W)
-
+
-
+
PULS
SIGN
-
+
M
Kp
ENC
CN2
CN4
CN1
1
SERVOPACK
Position reference speed
Position
amplifier error
Motor rotational
speed
Speed reference
Active gain
Torque
reference
Speed
conversion
Electronic
gear
Speed
loop
Current
loop
Electronic
gear
Position loop
Error
counter
Error
counter
Load
Position error
Positioning completed
Completion of position reference
Speed
conversion
Reference
Pulse
Multiplier
×
n
Analog
Parameter
Description
Monitor Signal
Unit
Remarks
Pn006
Pn007
n.
00
[Pn007
Factory
Setting]
Motor rotating speed
1 V/1000 min
-1
−
n.
01
Speed reference
1 V/1000 min
-1
−
n.
02
[Pn006
Factory
Setting]
Torque reference
1 V/100% rated torque
−
n.
03
Position error
0.05 V/1 reference unit
0 V at speed/torque control
n.
04
Position amplifier error
0.05 V/1 encoder pulse
unit
Position error after electronic
gear conversion
n.
05
Position reference speed
1 V/1000 min
-1
The input reference pulses will
be multiplied by n to output the
position reference speed.
n.
06
n.
07
Reserved (Do not change.)
−
−
n.
08
Positioning completed
Positioning completed:
5 V
Positioning not com-
pleted: 0 V
Completion indicated by out-
put voltage.
n.
09
Speed feedforward
1 V/1000 min
-1
−
n.
0A
Torque feedforward
1 V/100% rated torque
−
n.
0B
Active gain
*
1st gain: 1 V
2nd gain: 2 V
Gain type indicated by output
voltage.
n.
0C
Completion of position reference
Completed: 5 V
Not completed: 0 V
Completion indicated by out-
put voltage.
n.
0D
Reserved (Do not change.)
−
−