Table 84: rover site id request, Table 85: base station id, And table 85 – NavCom Sapphire Rev.J User Manual
Page 207
Sapphire Technical Reference Manual Rev. J
207
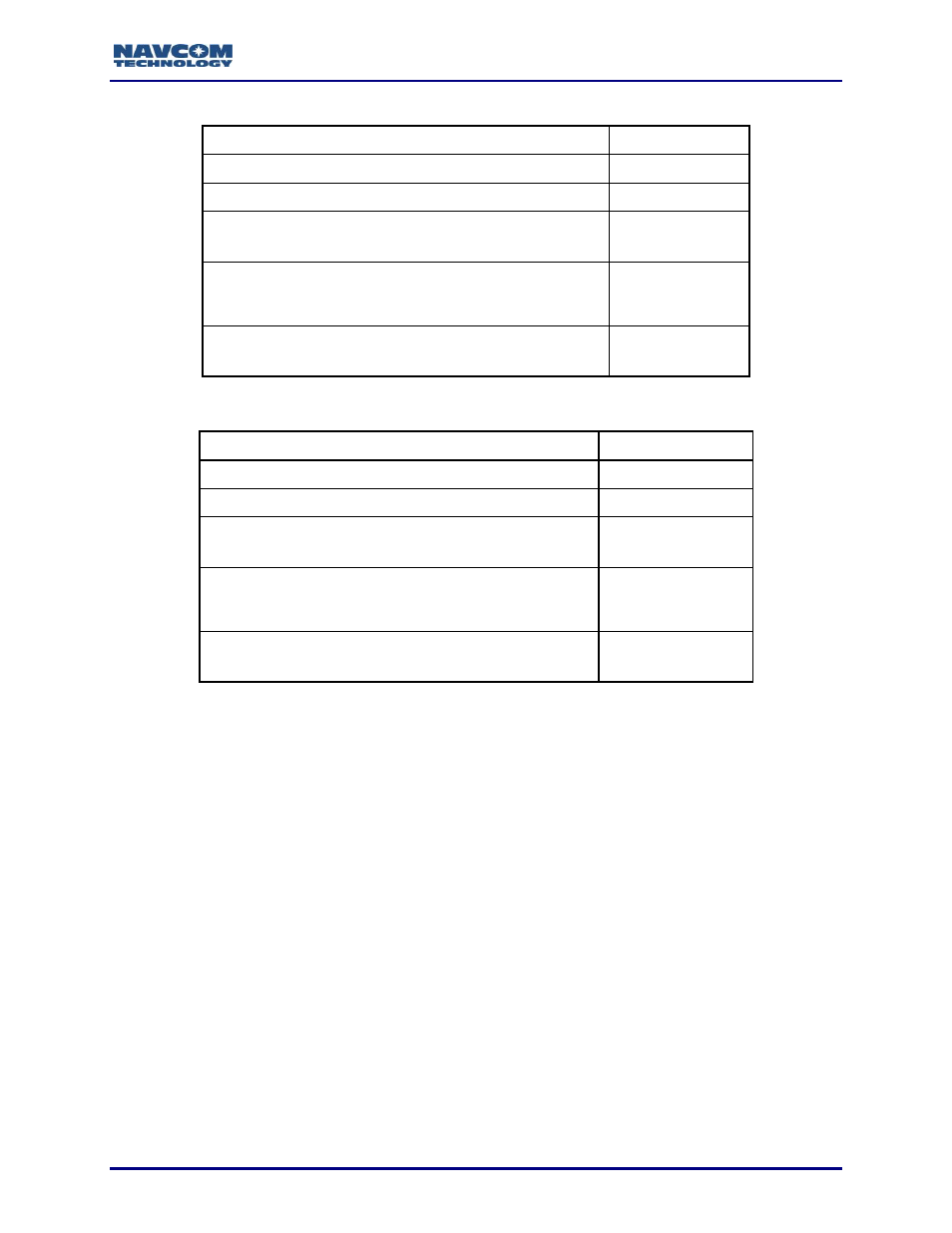
Table 84: Rover Site ID Request
dGPS Correction Type
Station ID Range
CMR
0
– 31
CMR+
0
– 255
RTCM
(Includes RTCM1, RTCM9, RTCM1819, RTCM2021)
0
– 1023
RTCMv3
(Includes RTCM1001, RTCM1002, RTCM1003,
RTCM1004)
0
– 4095
NCT
(Includes 5B, 5E)
0
– 1023
Table 85: Base Station ID
dGPS Correction Type
Station ID Range
CMR
1-31
CMR+
1-255
RTCM
(Includes RTCM1, RTCM9, RTCM1819)
1-1023
RTCMv3
(Includes RTCM1001, RTCM1002, RTCM1003,
RTCM1004)
0-4095
NCT
(Includes 5B, 5E)
1-1023
Examples:
[RTKMODE]ROVER, CMR, 2,
Configures the receiver to be a rover. The rover will accept dGPS corrections from
site id 2; the site id range will be checked against the CMR correction type.
[RTKMODE]BaseRTCM1,,,3, Static,MANUAL
Configures the receiver to be an RTCM type 1 base station; the default station id is
default 1, with the output port set to 3 and the base station in static mode. This
command is set to not allow automatic scheduling and de-scheduling of messages.
Schedule the desired individual RTK correction messages using the [OUTPUT]
command.
[RTKMODE]BASE5E,,,1,DYNAMIC
Configures the receiver to be an NCT moving base and to output corrections on
port 1
[RTKMODE]ROVER,NCT,,,DYNAMIC
Configures the receiver as an NCT moving base RTK rover