Datum (ascii), Reference frame at default state, Reference frame at non-default state – NavCom Sapphire Rev.J User Manual
Page 87: Command format and usage
Sapphire Technical Reference Manual Rev. J
87
1.31 DATUM (ASCII)
SF-3050
Sapphire
SF-3040
This command allows a user to check the current datum (a reference surface to be used in
defining the 3D coordinates of a position) or to set a specific datum to be used as the position
for all PVT data output.
1.31.1 Reference Frame at Default State
At default (when a user does not specify any particular reference frame), the output of
the navigation position (i.e., in the PVT1B message) is the data in the default frame.
In this state, there will be no datum transformation to the position data. The navigation
library currently provides the solution in one of three reference frames (data), WGS84,
ITRF2005 or ITRF2008. Refer to Table 177 for the datum used in the solution.
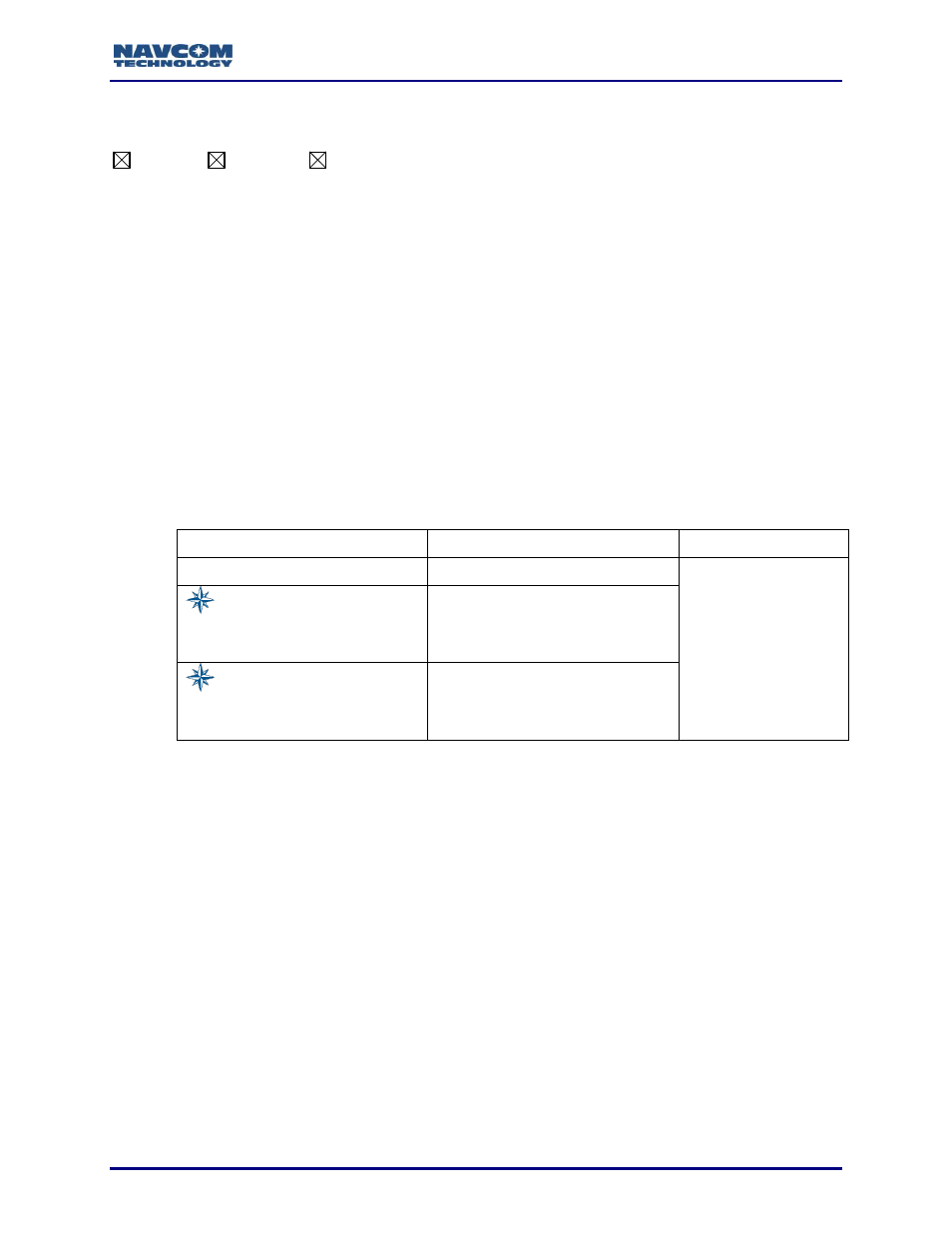
1.31.2 Reference Frame at Non-Default State
When a user selects a non-default datum, an additional transformation process takes
place at the navigation library level to transform the solution data into the user-selected
target datum. The following table lists the transformation(s) undertaken to transform the
default datum to a user-specified datum.
Datum at the Default State
Transformation
Solution in Datum
WGS84 (G1150)
WGS84 to User-Specified
User-Specified
ITRF2005 (v2.0.22.0 to
v2.2.9; and v3.0.9.0 and later
when in StarFire GPS mode)
1. ITRF2005 to WGS84
2. WGS84 to User-Specified
ITRF2008 (v3.0.9.0 or
later for StarFire GNSS
mode)
1. ITRF2008 to ITRF2005
2. ITRF2005 to WGS84
3. WGS84 to User-Specified
1.31.3 Special Considerations for the RTCM and RTK-Based Solutions
These are situations in the base and rover receiver setups in which the rover outputs the
position relative to the base position. The reference frame used in solutions from the
rover is reconciled with the data it receives from the base. That is, the base receiver
dictates the solution type it outputs as well as the solution type in the rover receivers that
receive the correction from the base.
Selecting a non-default datum on the rover can affect the accuracy of the
output position. If the user inputs a user datum at the base, the rover should
not apply a local datum transformation as this will cause the rover to have
applied the datum shift twice (once at the base and once at the rover). In
this scenario, the rover is positioning on the base’s locally corrected datum.
If the base’s position is not transformed to the local datum, then the rover
must apply a datum transform to achieve a local position. The best practice
is to position the rover on a known monument and validate the position
accuracy of the receiver prior to positioning field work. If the position is in
error, validate that the transform settings are correct.
1.31.4 Command Format and Usage